August 25, 2016
野々下裕子 yuko_nonoshita
フリーランスライター。大阪のマーケティング会社勤務を経て独立。主にデジタル業界を中心に国内外イベント取材やインタビュー記事の執筆を行うほか、本の企画編集や執筆、マーケティング業務なども手掛ける。掲載媒体に「月刊journalism」「DIME」「CNET Japan」「WIRED Japan」ほか。著書に『ロンドンオリンピックでソーシャルメディアはどう使われたのか』などがある。
本記事では、神戸サンボホールで開催された「第16回 レスキューロボットコンテスト」(以下、レスコン)のファイナルミッションの模様を中心に紹介する。
ミッションはフィールドの両側に分かれた2チームが、プレゼン2分、作戦タイム2分ののち、本番のレスキュー活動を行う。救助活動中という設定のた めか応援合戦などは一切無く、競技は淡々と進行し、ロボットの動きを見るだけでは何が起こっているかがわかりにくいため、実況中継によるくわしい解説が行われ、救助の状況やポイントは会場のインジケーター画面にリアルタイムで表示される。
▼ダミヤンの状態や獲得ポイントはインジケーター画面でリアルタイムで表示される。


▼競技中の応援などはない代わりに解説や実況中継で会場を盛り上げる。

フィールドのどこにダミヤンがいるかは、写真のように図で会場参加者に知らされるが、チームメンバーは自分たちで判断せねばならず、あとはロボットに搭載したカメラの映像だけを頼りに救助活動を行わねばらならない。
▼どのロボットをどのように組み合わせて作業するかといった現場の判断力が求められる。

▼ロボットの操作は全て無線が頼りになるため会場内ではネットの使用が禁止されていた。

また、競技中はフィールドを破壊したり、相手チームの作業を妨害したり、ダミヤンに対して危険な行為をしたとみなされた場合、「イエローフラグ(警告)」「レッドフラグ(退場)」「ブラックフラグ(失格)」のペナルティが審判から課されるなど、ルールはかなり厳しいものになっている。対して、「コントロールルーム間通信者」を通じて相手チームに情報を提供したり、連携すると得点となるなど細かい審査ポイントが設けられている点も、他のロボコンとは大きく異なるところである。
▼救出活動を審判が細かくチェックし、危険行為に対してはペナルティが課される。

▼コントロールルームには相手チームと情報を共有する機能も用意されている。

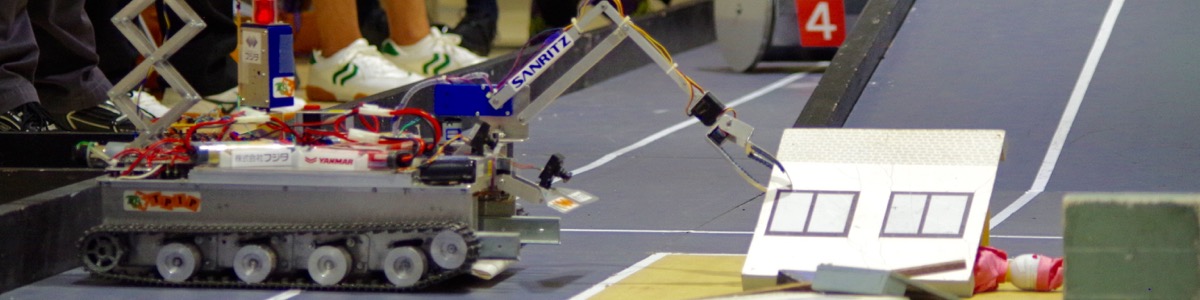
救出では、ダミヤンの上に覆いかぶさるガレキをはさんで持ち上げたり、隙間にアームやハンドルを差し込んで移動させるなど、細やかなロボットハンドの操作が必要になるため、多くのチームが手元のハンドルとロボットのハンドルが連携して動くマスタースレーブを採用していた。他にも作業中の振動を抑えたり、衝撃を軽減するエアバッグなど、いろいろなアイデアが考えられていた。
ダミヤンを搬送するためにロボットへ移動する方法も、ハンドルで引き上げたり、角度が調節できるベルトコンベアを使ったり、クッションの付いたハンドルで両側からすくい上げるなどいろいろ工夫が見られた。搬送中も衝撃をやわらげるためハンモック状のネットをロボット内に設置したり、外からの衝撃を避けるためカバーをするなど、実践に求められる機能をきちんと盛り込んだロボットが多いのも興味深かった。
▼細やかなリモート操作が必要になるため、手元のハンドルの動きがそのままロボットに伝わるマスタースレーブを搭載したロボットが多かった。

▼搬送ではダミヤンをベルトコンベアで運び込むパターンが多かった。

他にも、作業状況を周囲に知らせる電光掲示板を搭載したロボットや、仮設の救援所にできるロボットなど、競技に直接関係はないものの、実際の救助活動で必要になりそうな機能を持つロボットを製作するチームもあり、それらは審査で高く評価されていた。
競技中の得点は、ダミヤンの体力を示すフィジカルポイント(100点満点から減点)と作業の達成度を示すミッションポイント(900点満点)があり、獲得ポイント数は発表されるが、それによって賞が決まるわけではない。他にも、審査員による評価(600点満点)を合わせた総合点数でさまざまな賞が決まる。
実際今回は、最優秀賞にあたるレスキュー工学大賞は、ファイナルミッションで最高得点だった松江高専機械工学科の「MCT」ではなく、岡山県立大学ロボット研究サークルの「メヒャ!」に授与された。ダミヤン目線での救出コンセプトで安全性を重視し、フィジカルポイントの減点も少なかったこと、細かいところでは家の模型からダミヤンを救出する際に振動を抑えるロボットを使った点が評価され、合わせてベストパフォーマンス賞も受賞した。
▼レスキュー工学大賞に選ばれた「メヒャ!」のロボットが家の模型からダミヤンを救出する様子はこちらの動画で見られる。

「メヒャ!」よりもミッションポイントが上だった「MCT」は、ベストチームワーク賞を受賞。3台あるロボットの一台に、高い位置と低い位置にそれぞれカメラを設置して状況を把握しやすくしたことや、スピードある救出作業を行ったことなどが評価された。

得点では3位だった神戸大学の「六甲おろし」は、オキュラス・リフトを使った立体映像や自由度の高いアームやベルトコンベアで柔軟な作業を可能にしている点など、高い技術を積極的に取り入れたことが評価され、ベストロボット賞を受賞している。

全体で目立っていたのは、ベストテレオペレーション賞を受賞した大阪工業大学モノラボロボットプロジェクトの「大工大エンジュニア」で、ダミヤンを救助するタイミングをセンサーで知らせたり、位置を知らせる自律移動型の誘導ロボットなど、最多7台のロボットを持ち込み、デザインやアイデアのユニークさで注目を集めていた。


レスコンでは本選の表彰とあわせて第12回竸基弘(きそいもとひろ)賞の発表授与式も行われた。本賞は大学でロボット研究を行うも阪神淡路大震災で被災し、23歳の若さで亡くなった神戸大学のロボット研究者である竸基弘氏の名前を冠した賞で、レスキューシステムの研究開発に貢献し、競氏が目指した”人を癒すロボット”の開発を進める40歳未満の若手の研究者や技術者を表彰するものである。レスコンなどの参加学生を対象にしており、ファイナルミッションには出場できなかったものの、ロボットのコンセプトが評価された金沢工業大学夢工房の「MS-R」が受賞している。

その他にも会場では、前回の竸基弘賞を受賞した岡山大学大学院の亀川哲志氏によるヘビ型レスキューロボットの開発に関する講演や、子供たちを対象にしたロボットの展示イベントも行われ、レスキューロボット全体に対する関心を高めようとするプログラムになっていた。
▼ヘビ型ロボットの開発で世界からも注目を集める亀川哲志氏の講演はコンテスト参加者向けにかなり専門的な内容であった。


▼小さな子どもや初心者を対象にした参加型の展示イベントも行われていた。

今回、レスコンを取材して、ロボット技術の進化と共にレスキューロボットのアイデアが進化していることがよくわかった。さらに11月には別途、ヒト型のレスキューロボットコンテストの開催も予定されているとのことで、これらのコンテストを通じて実際の災害現場で役立つレスキューロボットが登場することに期待したい。