
August 24, 2016
野々下裕子 yuko_nonoshita
フリーランスライター。大阪のマーケティング会社勤務を経て独立。主にデジタル業界を中心に国内外イベント取材やインタビュー記事の執筆を行うほか、本の企画編集や執筆、マーケティング業務なども手掛ける。掲載媒体に「月刊journalism」「DIME」「CNET Japan」「WIRED Japan」ほか。著書に『ロンドンオリンピックでソーシャルメディアはどう使われたのか』などがある。
1995年の阪神淡路大震災をきっかけに本格化したレスキューロボットの研究開発に合わせて始まった「レスキューロボットコンテスト」(以下、レスコン)の 第16回大会が2日間にわたって神戸で開催され、全国から予選を勝ち残った14チームが参加。うち8チームがファイナルミッションに挑んだ。
レスコン開催の目的は、レスキューシステムの拡充と災害に強い街づくりのために、専門家や研究者が思いつかないような新しい発想と技術を持つ人材を発掘、育成することにある。そのため毎年基本的に同じ、『架空の研究所である「国際レスキュー工学研究所」内にある地震の被災地を6分の1スケールの実験フィールドにおいて、リモートコントロールで救命救助活動を行うロボットの技術評価と訓練をコンテスト形式で行う』というストーリーで実施されている。
▼競技は6分の1スケールの災害現場を舞台に行われる。

競技は、ガレキや家の中に閉じこめられた要救助者のダミー人形「ダミヤン」を救助する時間を競うが、高さ450mm、幅1,200mmのベースゲートを通り抜けられれば、ロボットの大きさや台数、仕様に制限は無い。ただし、競技ルールは現実の被災現場に合わせて厳しく設定されており、たとえばダミヤンを強く掴んだり振動を与えると、圧力や振動を感じるセンサーが生命の危険と判断し、フィジカルポイントが減点されるため「やさしい救助」が求められる。
▼フィールドからダミヤンを探し出して救出し、ベースゲートまで搬送する技術を競う。

▼ダミヤンには各種センサーが搭載されておりやさしく救助しなければ減点される。
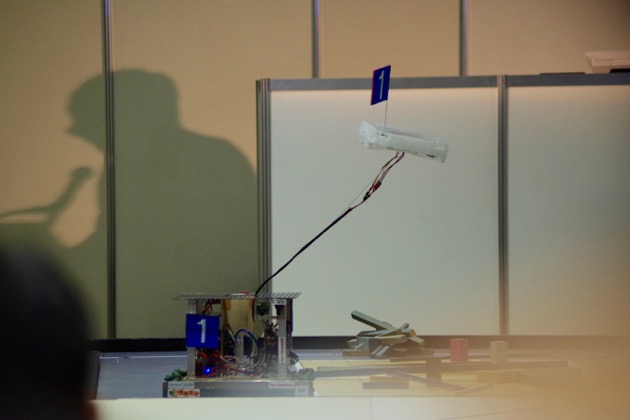
また、災害現場には人が入れない場合が多いため、レスコンでのロボット操作は無線コントロールのみで行う。コントロールルームからフィールドを直接見ることもできず、救助活動はフィールド全体を俯瞰する「ヘリテレ」カメラとロボットに搭載した無線カメラの映像だけを使用する。しかもファイナルミッションでは、競技中に見られるのはの映像のみとされ、難易度が大幅に引き上げられた。そのため、ロボットのどの位置にどのようなカメラを設置するかなど各チームが創意工夫をこらしていた。
▼競技中は直接フィールドを見られず,ロボットのカメラ映像だけを頼りにリモートコントロールしなければならない。

▼俯瞰カメラ(ヘリテレ)からの映像はファイナルミッションでは封じられ、難易度が大幅に引き上げられた。

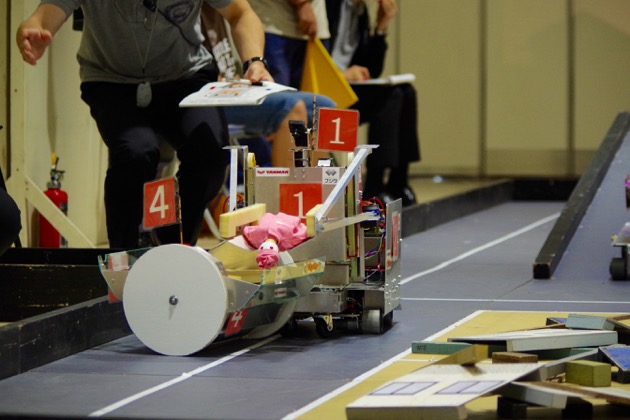
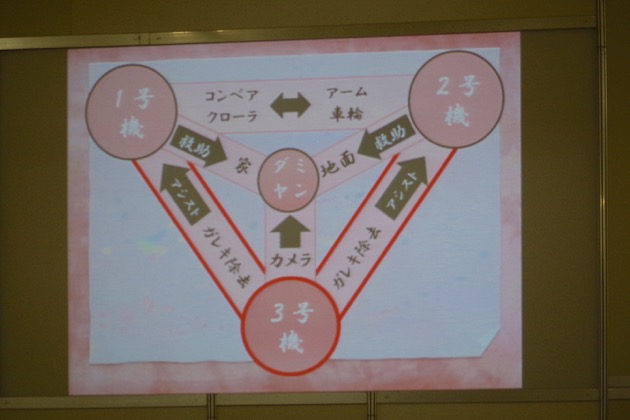
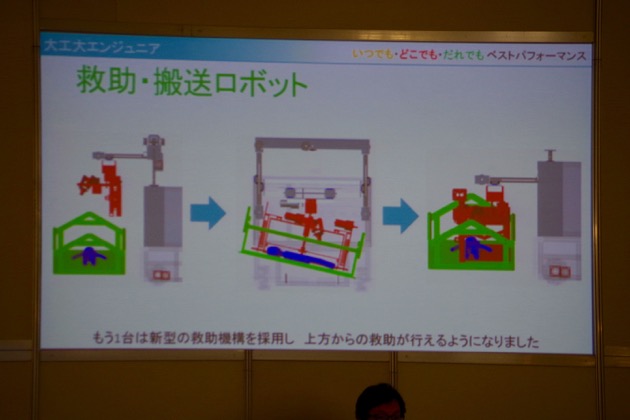
これらの様々な条件から、多くのチームは障害の撤去、救助、搬送という目的に合わせて機能を高めた複数のロボットを組み合わせるパターンが多かった。実際の救助活動を考えると、特化した機能を持つロボットを複数台組み合わせる方が効率がいいのか、様々な機能を持つロボットを7台も製作したチームもあり、ドローンや自律型といった最新技術にチャレンジしたチームもあった。
▼救出と搬送など、持つロボットを組み合わせて操に特化したベッド型の救助ロボットを救出ロボットとペアで動かすことで、作業効率アップを狙う。

▼視野を確保するため360度カメラやドローンを搭載するロボットもあった。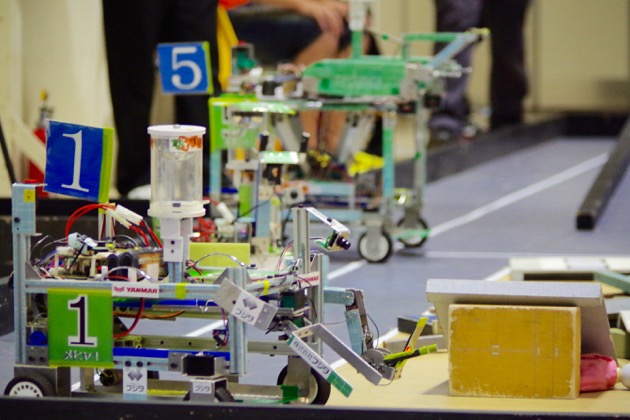
コンテストに参加するチームメンバーの上限は15名だが、競技を行う「ミッションメンバー」は上限8名となっている。全体を統括する「キャプテン」とロボットを操縦する「オペレーター」、関連機器をチェックする「レスコンボード管理者」、フィールド内のロボットを移動したり回収する「ヘルパー」などそれぞれ役割が決められている。また、実際の救助活動では現場の情報共有が欠かせないことから、対戦中に相手チームへ適切な情報を提供する「コントロールルーム間通信者」という役割も用意されている。
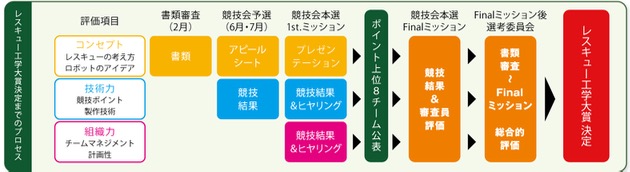
このようにレスコンは他のロボコンとは異なり、ロボットや操作の技術を競うものの目的は対戦相手に勝つことではなく、いかに救助を行うかを重視している。 ミッションをクリアしたポイントだけでなく、「コンセプト」、「技術力」、「組織力(チームワーク)」という3つが審査対象になっており、チームのレスキューに対する考え方も審査対象となる。
そのため、競技前に救出方法やロボットの機能などをがプレゼンする「スピーカー」という、他のロボコンにはないユニークな役割も設けられている。スピーカーはそこで救助方法とそれに合わせてロボットにどのような機能を取り入れたかを説明する。審査員は実際のミッションでどこまでコンセプト通りに実行できたか、メンバー内外での情報共有力や進行マネジメントといった組織力についても評価することになる。
▼救助方法やロボットの機能を説明するプレゼンも重要な審査対象となっている。
▼コンテスト全体の選考内容
ミッションはフィールドの両側に分かれた2チームが、プレゼン2分、作戦タイム2分ののち、本番のレスキュー活動を行う。救助活動中という設定のためか応援合戦などは一切無く、競技は淡々と進行し、ロボットの動きを見るだけでは何が起こっているかがわかりにくいため、実況中継によるくわしい解説が行われ、救助の状況やポイントは会場のインジケーター画面にリアルタイムで表示される。
ファイナルミッションの様子については、次回で詳しく紹介する。